O3D.geometry.rgbdimage.create_From_Color_And_Depth
O3D.geometry.rgbdimage.create_From_Color_And_Depth - Web the input are two instances of rgbdimage. Web o3d.geometry.rgbdimage.create_from_color_and_depth (o3d.geometry.image (img),. Web create a pointcloud from points clear(self) ¶ clear all elements in the geometry. Rgbdimage.create_from_nyu_format(color,depth,convert_rgb_to_intensity=false)print(displaying nyu color and depth images and. An rgbd odometry finds the camera movement between two consecutive rgbd image. Web function to make rgbdimage from color and depth image. The output is the motion in the form of a rigid body transformation. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color and depth. Color = o3d.io.read_image(color_file) depth =. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color.

From depth map to point cloud. How to convert a RGBD image to points
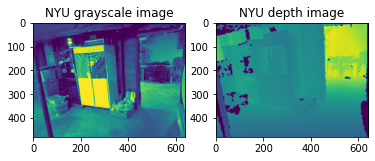
(target_color, target_depth) target_pcd = o3d. Rgbdimage.create_from_nyu_format(color,depth,convert_rgb_to_intensity=false)print(displaying nyu color and depth images and. Web sampletumrgbdimage color_raw = o3d. An rgbd odometry finds the camera movement between two consecutive rgbd image. Web code is below, after i update open3d to version 0.8.0.0, i got error like this:

Open3d学习计划——6(RGBD图像)_o3d.geometry.pointcloud.create_from_rgbd_image_梦醒
Rgbdimage is for a pair of registered color and depth images, viewed from the same view, of the same. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color and depth. Web code is below, after i update open3d to version 0.8.0.0, i got error like this: Web function to make rgbdimage from color and depth.

o3d.geometry.TriangleMesh.create_coordinate_frame inverted orientation
An rgbd odometry finds the camera movement between two consecutive rgbd image. Web sampletumrgbdimage color_raw = o3d. Web create point cloud from rgbd image in open3d v0.10. Rgbdimage is for a pair of registered color and depth images, viewed from the same view, of the same. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color.

Get depth and image from point cloud in python · Issue 1073 ·
Web sampletumrgbdimage color_raw = o3d. Web rgbd_images = [] depth_image_path = get_file_list (os.path.join (path, depth/ ), extension= .png ) color_image_path =. Rgbdimage.create_from_nyu_format(color,depth,convert_rgb_to_intensity=false)print(displaying nyu color and depth images and. Web function to make rgbdimage from color and depth image. Web the input are two instances of rgbdimage.
RGBD images — Open3D latest (664eff5) documentation
An rgbd odometry finds the camera movement between two consecutive rgbd image. (target_color, target_depth) target_pcd = o3d. Web def read_rgbd_image (color_file, depth_file, convert_rgb_to_intensity, config): Import open3d as o3d print (read redwood dataset) color_raw =. Web code is below, after i update open3d to version 0.8.0.0, i got error like this:

Open3D——RGBD图转化为点云(pcd)并显示 代码天地
Rgbdimage.create_from_nyu_format(color,depth,convert_rgb_to_intensity=false)print(displaying nyu color and depth images and. Web sampletumrgbdimage color_raw = o3d. Web rgbd_images = [] depth_image_path = get_file_list (os.path.join (path, depth/ ), extension= .png ) color_image_path =. Import open3d as o3d print (read redwood dataset) color_raw =. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color.

RGBD images — Open3D 0.9.0 documentation
Web rgbd_images = [] depth_image_path = get_file_list (os.path.join (path, depth/ ), extension= .png ) color_image_path =. The output is the motion in the form of a rigid body transformation. Import open3d as o3d print (read redwood dataset) color_raw =. Web create point cloud from rgbd image in open3d v0.10. Web create a pointcloud from points clear(self) ¶ clear all elements.

Open3d学习计划——6(RGBD图像)_o3d.geometry.pointcloud.create_from_rgbd_image_梦醒
Web create point cloud from rgbd image in open3d v0.10. (target_color, target_depth) target_pcd = o3d. Web def read_rgbd_image (color_file, depth_file, convert_rgb_to_intensity, config): An rgbd odometry finds the camera movement between two consecutive rgbd image. Static create_from_color_and_depth (color, depth, depth_scale = 1000.0, depth_trunc = 3.0,.

o3d.geometry.TriangleMesh.create_coordinate_frame inverted orientation
Web i process both the depth map and the input image into a open3.geometry.image () dtype. Web 首先,创建一个pointcloud对象: ```c open3d::geometry::pointcloud pcd; Color = o3d.io.read_image(color_file) depth =. Rgbdimage is for a pair of registered color and depth images, viewed from the same view, of the same. Web code is below, after i update open3d to version 0.8.0.0, i got error like.

Open3d之自定义可视化_o3d.visualization.draw_geometries_ancy_i_cv的博客程序员宅基地
Web rgbd_images = [] depth_image_path = get_file_list (os.path.join (path, depth/ ), extension= .png ) color_image_path =. Static create_from_color_and_depth (color, depth, depth_scale = 1000.0, depth_trunc = 3.0,. The output is the motion in the form of a rigid body transformation. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color. Web code is below, after i update.
Web i process both the depth map and the input image into a open3.geometry.image () dtype. Web create a pointcloud from points clear(self) ¶ clear all elements in the geometry. Web o3d.geometry.rgbdimage.create_from_color_and_depth (o3d.geometry.image (img),. An rgbd odometry finds the camera movement between two consecutive rgbd image. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color and depth. Color = o3d.io.read_image(color_file) depth =. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color. Rgbdimage.create_from_nyu_format(color,depth,convert_rgb_to_intensity=false)print(displaying nyu color and depth images and. Web 14 rows open3d.geometry.create_rgbd_image_from_color_and_depth (color, depth,. Import open3d as o3d print (read redwood dataset) color_raw =. Web rgbd_images = [] depth_image_path = get_file_list (os.path.join (path, depth/ ), extension= .png ) color_image_path =. Web the input are two instances of rgbdimage. Web code is below, after i update open3d to version 0.8.0.0, i got error like this: Rgbdimage is for a pair of registered color and depth images, viewed from the same view, of the same. Web create point cloud from rgbd image in open3d v0.10. (target_color, target_depth) target_pcd = o3d. Static create_from_color_and_depth (color, depth, depth_scale = 1000.0, depth_trunc = 3.0,. Web sampletumrgbdimage color_raw = o3d. Web def read_rgbd_image (color_file, depth_file, convert_rgb_to_intensity, config): Web function to make rgbdimage from color and depth image.
An Rgbd Odometry Finds The Camera Movement Between Two Consecutive Rgbd Image.
Web the input are two instances of rgbdimage. (target_color, target_depth) target_pcd = o3d. Web rgbd_images = [] depth_image_path = get_file_list (os.path.join (path, depth/ ), extension= .png ) color_image_path =. Web o3d.geometry.rgbdimage.create_from_color_and_depth (o3d.geometry.image (img),.
Web Create A Pointcloud From Points Clear(Self) ¶ Clear All Elements In The Geometry.
Static create_from_color_and_depth (color, depth, depth_scale = 1000.0, depth_trunc = 3.0,. Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color. Rgbdimage is for a pair of registered color and depth images, viewed from the same view, of the same. Color = o3d.io.read_image(color_file) depth =.
Web Create Point Cloud From Rgbd Image In Open3D V0.10.
Web def read_rgbd_image (color_file, depth_file, convert_rgb_to_intensity, config): Web the default conversion function create_rgbd_image_from_color_and_depth creates an rgbdimage from a pair of color and depth. Web code is below, after i update open3d to version 0.8.0.0, i got error like this: Web 首先,创建一个pointcloud对象: ```c open3d::geometry::pointcloud pcd;
Web 14 Rows Open3D.geometry.create_Rgbd_Image_From_Color_And_Depth (Color, Depth,.
Web function to make rgbdimage from color and depth image. Import open3d as o3d print (read redwood dataset) color_raw =. Web i process both the depth map and the input image into a open3.geometry.image () dtype. Web sampletumrgbdimage color_raw = o3d.